Ground Station Software &
Object-Oriented Programming
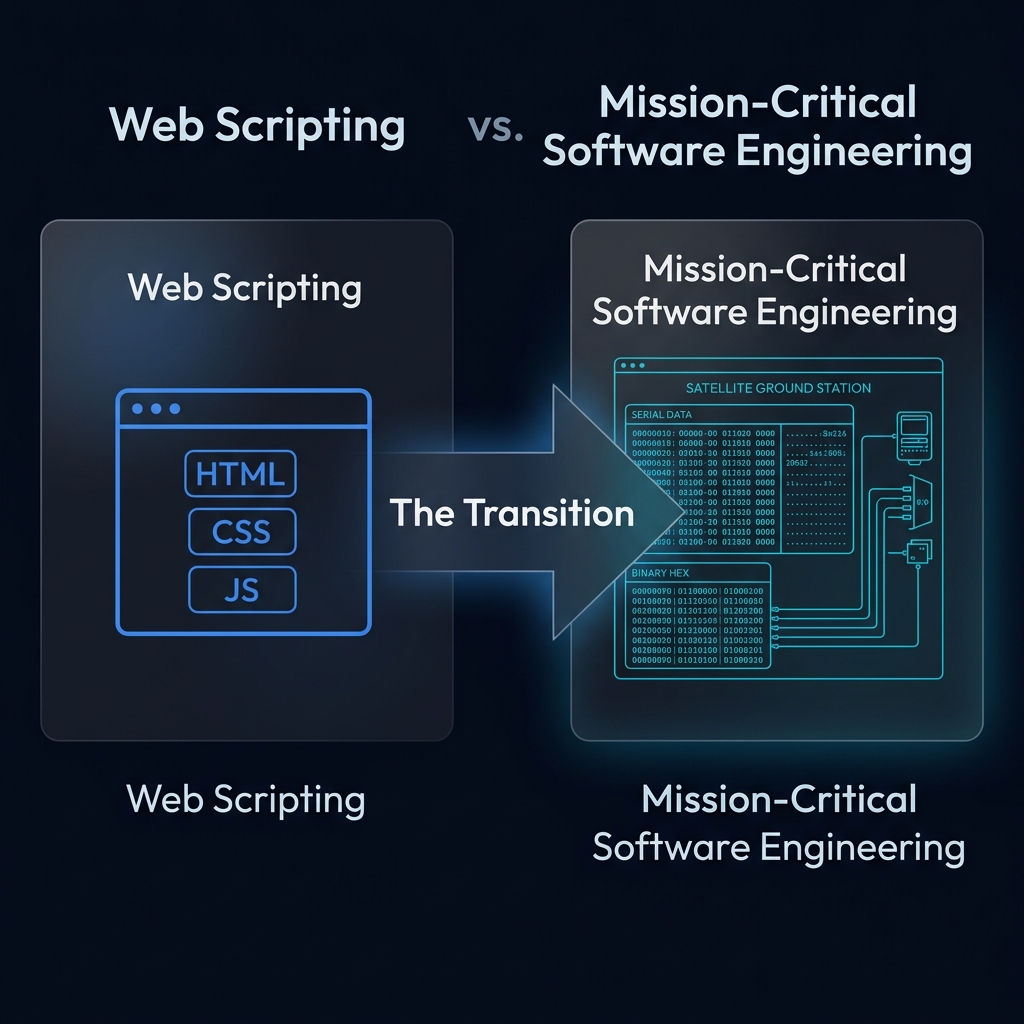
Bridging the gap between Web Scripting and Mission-Critical Systems in Space Engineering.


In the Space Apps bootcamp, you learned web scripting (HTML, CSS, JavaScript, Leaflet maps, and Firebase databases) to create interactive visual interfaces. Developing ground station middleware introduces structural shifts:
| Aspect | Web Scripting | Mission Software |
|---|---|---|
| Goal | UX and reactive interfaces. | Reliability and data parsing. |
| Failure | Reload the page. | Loss of Mission. |
| Data | Strings, JSON. | Raw bytes, binary frames. |
| Hardware | Browser sandbox, APIs. | Serial ports, radio links. |
As you transition into building a satellite ground station, ad hoc scripting files quickly become unmanageable. Ground station software must handle multiple concurrent tasks:
- Concurrency: Reading serial data streams from a radio transceiver while simultaneously updating real-time tracking graphs, logging entries to a local server, and waiting for user command inputs.
- Determinism & Robustness: A ground station cannot afford unexpected crashes, memory leaks, or unhandled exceptions when tracking a satellite overhead.
- State Consistency: Your software needs to track the precise status of the satellite pass, including ground track coordinates, active serial port, radio link quality, and tracking angles.

In professional aerospace and mission software engineering, individual code lines are rarely written from scratch. The true engineering innovation lies in the organization of code and the orchestration of workflows.
- Component Orchestration: Linking physical sensors, ESP32 microcontrollers, XBee radio transceivers, local Flask servers, and interactive web dashboards.
- Workflow Design: Composing data telemetry (downlink) and control instructions (uplink) into a secure, predictable loop.
- Systems Level Debugging: Troubleshooting an error by tracing it through hardware buffers, radio signals, serial parses, database saves, and browser rendering.
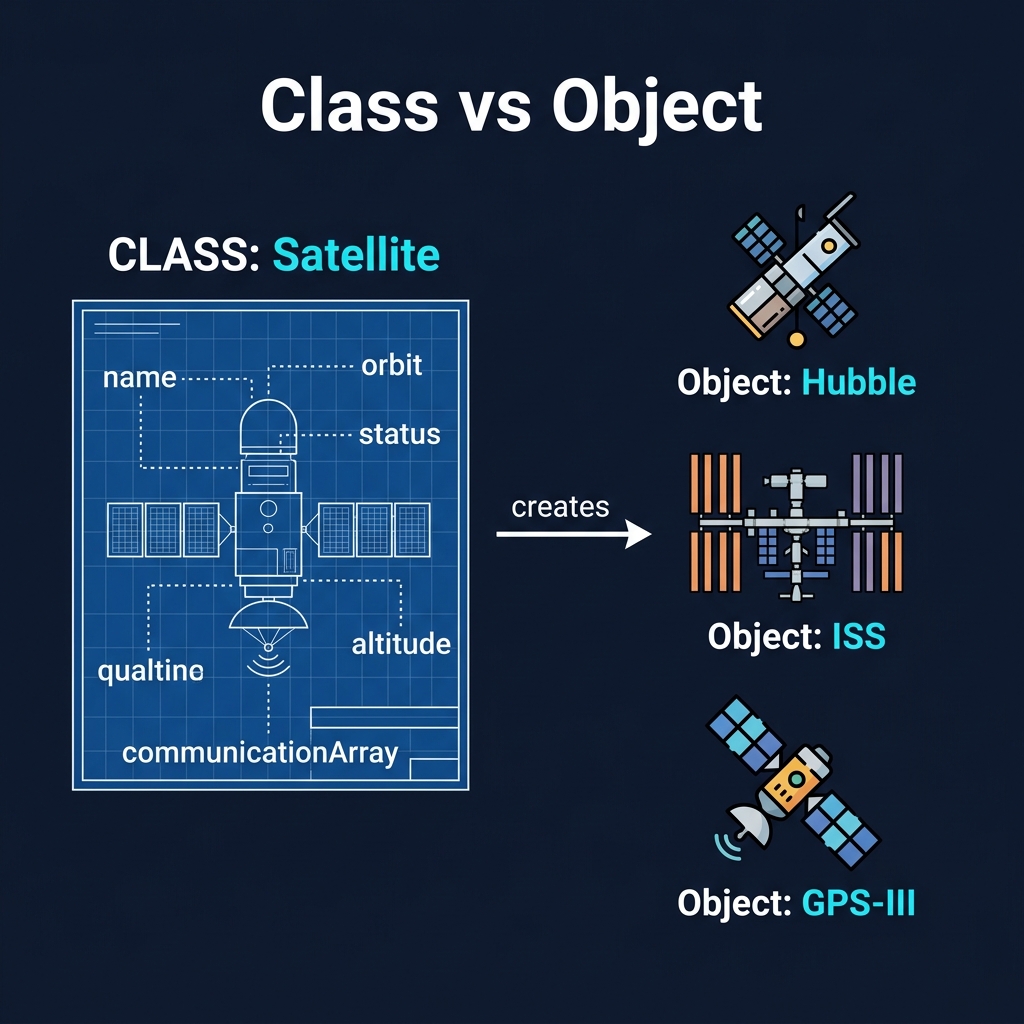
OOP organizes software around data (attributes) and behavior (methods) rather than sequential scripts. We model physical hardware as distinct, logical entities.
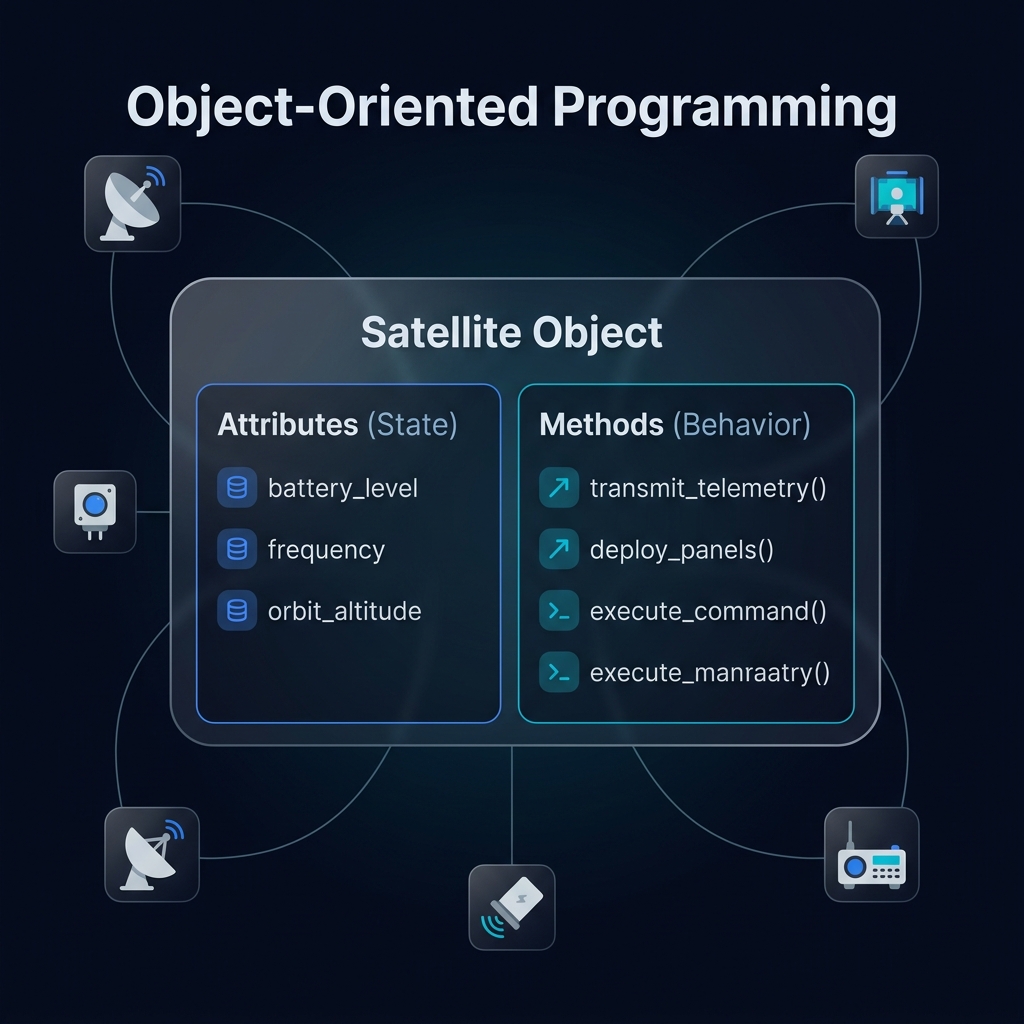
The same pattern applies directly to ground station development:
- Class (The Blueprint): Defines what attributes and methods all satellites share. No hardware or specific orbit exists yet.
- Object (The Instance): A specific satellite built from the blueprint, orbiting in its own track, with independent battery and telemetry values.
Satellite is the class, then ESTubeSat-1 and ESTubeSat-2 are two distinct objects, each running separate telemetry at different frequencies.
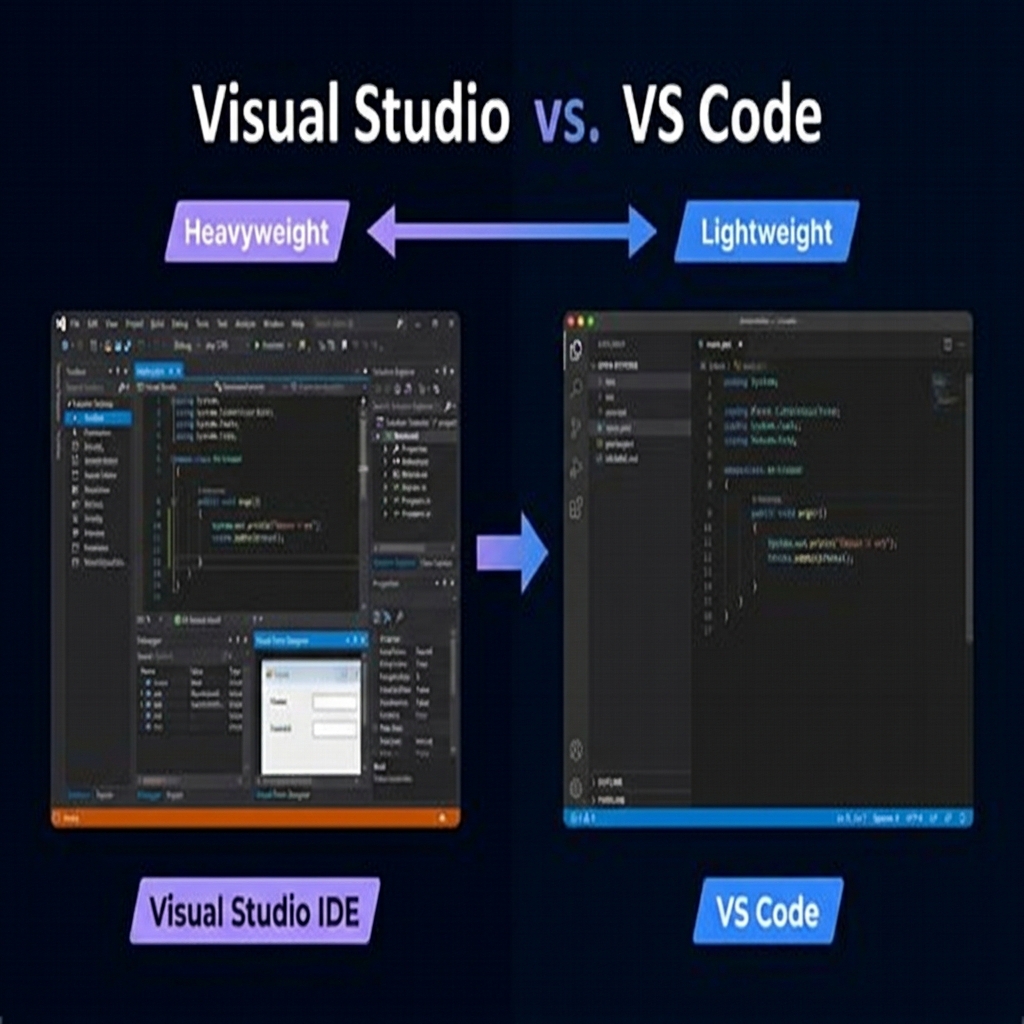
A major source of confusion for junior developers is the difference between Visual Studio and Visual Studio Code. Although developed by Microsoft, these tools are built for entirely different workflows. In this course, you will use both.
| Feature | Visual Studio (Full IDE) | Visual Studio Code (Code Editor) |
|---|---|---|
| Core Category | Heavyweight Integrated Development Environment (IDE). | Lightweight, fast Source Code Editor. |
| Primary Usage | Large-scale C#, C++, .NET enterprise, and Windows desktop application suites. | Web programming (HTML/JS), Python, scripting, and embedded firmware (via PlatformIO). |
| GUI Builder | Built-in drag and drop visual UI designers for desktop forms. | No visual GUI builder; relies on web pages or custom UI libraries. |
| Resource Footprint | Heavy (10-40 GB disk space, high RAM requirements). | Lightweight (200-500 MB, launches instantly). |
| Course Context | You will use this to build the C# .NET Windows desktop Ground Station app. | You will use this for Arduino/ESP32 C++ firmware and Web dashboard frontend. |
| AI Copilot | GitHub Copilot integrates natively. IntelliSense + Copilot suggestions inline while coding C#. | GitHub Copilot extension available. Works across all languages (JS, Python, C++). |
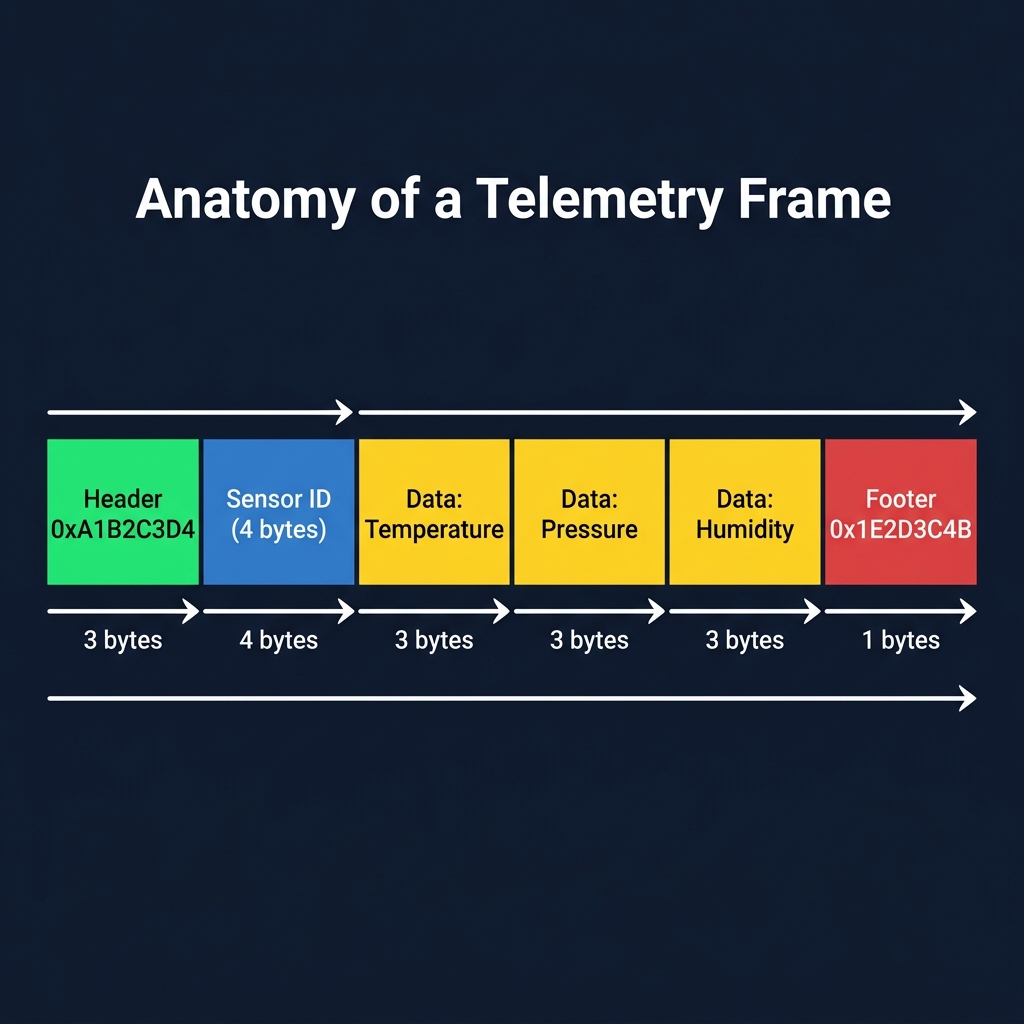
Dr. Ramson's satellite firmware packages sensor values into a rigid binary packet containing specific landmarks:
- Header (0xA1B2C3D4): A static 4-byte marker. The ground station monitors incoming serial data searching for this exact sequence to know a telemetry packet has arrived.
- Payload: Sensor IDs followed by three 4-byte floating point variables representing active sensor outputs (e.g., Temp, Hum, Press).
- Footer (0x1E2D3C4B): A static 4-byte trailing marker, confirming the packet is complete and was not corrupted during transmission.
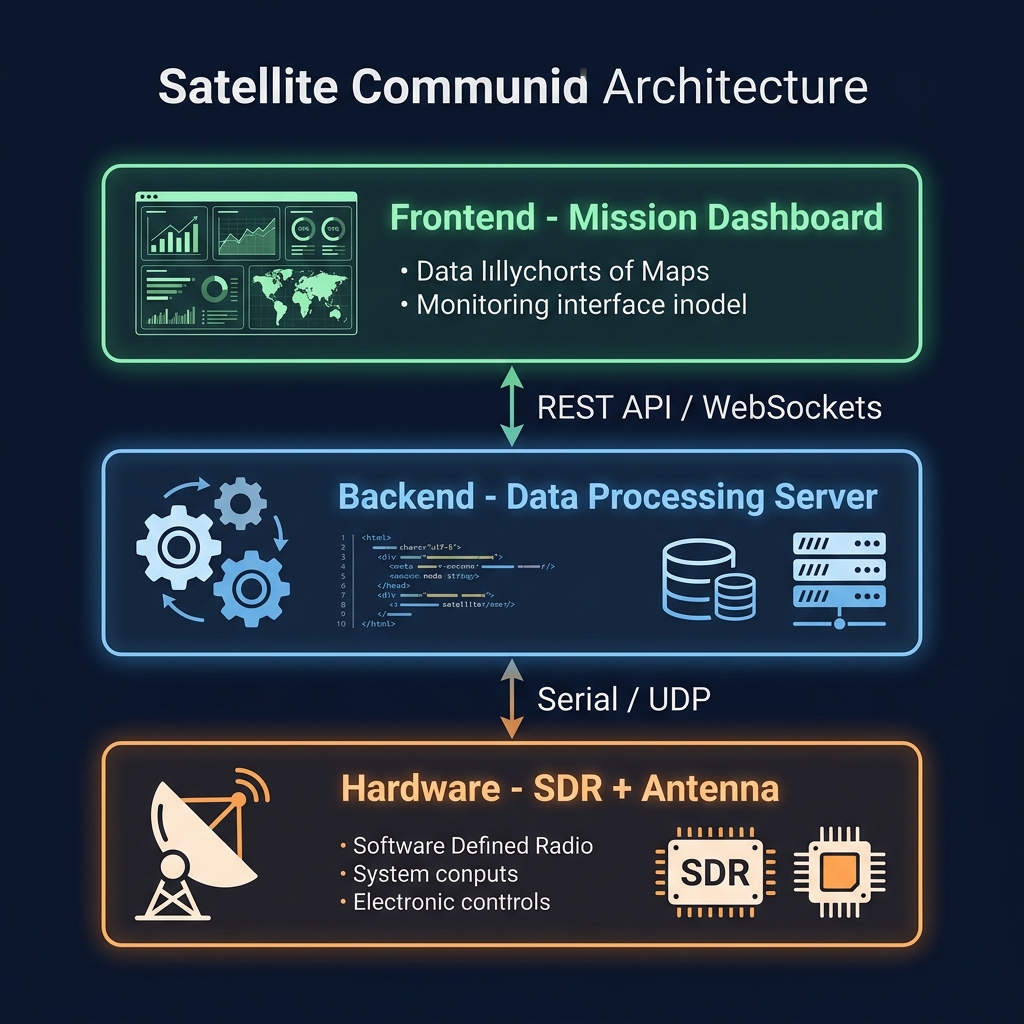
A comprehensive ground station architecture is a multi-layered system, bridging raw hardware streams up to web-based dashboards.
- Physical/Hardware Layer: The satellite orbital transceivers and antennas communicating RF signals.
- Middleware/TNC Layer: A Terminal Node Controller (TNC) like the Kantronics 9612XE, running in KISS mode to package raw radio packets into clean serial structures.
- Backend/Server Layer: Opens the serial ports, validates frames, archives telemetry to database, and schedules commands.
- Frontend Dashboard Layer: Updates real-time dials, track map, and visualizes status changes.
Hardware You Will Work With
Runs the satellite firmware (C++). Reads sensors, captures images, transmits binary telemetry via UART.
Radio link between satellite and ground station. Communicates via serial UART at 115200 baud.
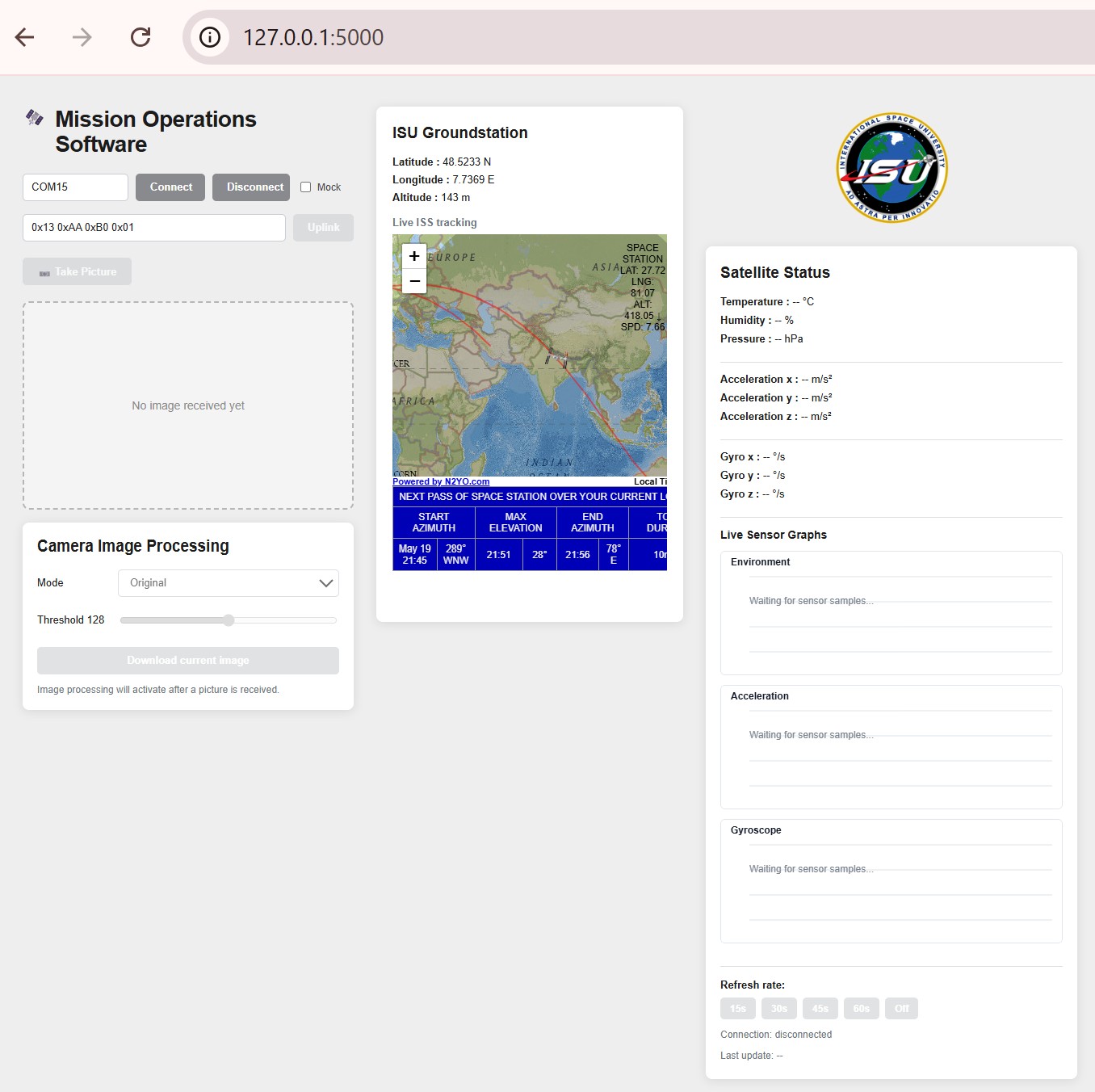
In your upcoming lab, your C# or Python full stack backend will drive an integrated Web Dashboard UI representing your primary control terminal.
- Satellite Track Map: An interactive map plotting predicted orbital passes and live positions.
- Command Terminal: Interactive buttons to construct and send hex command frames (like capturing an image or switching radio channels).
- Live Telemetry Dashboard: Responsive gauges and charts graphing temperatures, battery, and gyroscopic orientation dynamically.
- Camera JPEG Viewer: Displays image telemetry rebuilt byte-by-byte from satellite transmissions.